Semantic assistance system - route planning
For soil-conserving cultivation, soil-conserving driving routes are important to reduce the load on the soil during harvesting. For this purpose, the semantic assistance system offers route planning to present suitable routes to farmers.
A set of planning components are developed to generate machine routes aiming to improve the conservation of the soil during harvesting campaigns. The basic information of the field to be processed in the campaign, such as the field boundary, potential track reference lines, and location of unloading and access points, is obtained from manual inputs from the farmers (Phase 1) or from the semantically annotated geometric representation of the field and its surrounding area (Phase 2). These field data is used by the planning components to generate process-specific field geometries (e.g. surrounding headland and harvesting tracks) which are subsequently used to plan the harvesting process and generate the routes for the machines participating in the campaign, such as harvesters and overloading vehicles. The routes are generated based on a soil-cost map specific to the field and its current state, aiming to reduce the damage of the soil during driving. These routes are finally presented to the farmers as recommended driving paths to protect the soil.
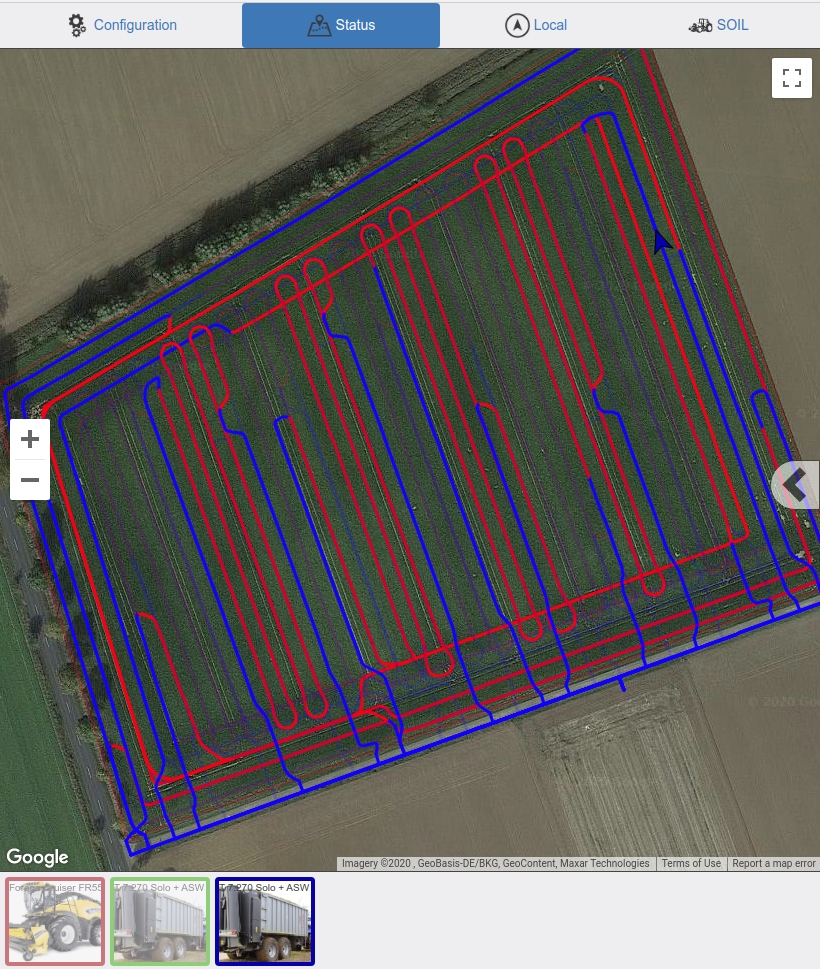
On phase 1 a first version of the route planning system was developed for silage maize harvesting. In this scenario, a harvester harvests the yield of the field, while a set of overloading vehicles (OLV) are loaded by the harvester and drive to predefined unloading locations when they are full, hence the overloading is shared between the participating OLVs. The harvester routes are generated in order to harvest the complete field following the generated tracks, whereas the OLV routes are generated to follow the harvester during yield overloading, and to drive from/to the unloading locations in a way that reduces the impact of their driving on the soil.
On phase II the route planning system is being been upgraded and extended. The extensions include the support of scenarios where only harvesters, equipped with bunkers, participate in the campaign, and are responsible of both harvesting and transporting the yield to the unloading locations. This type of planning can be used for harvesting scenarios such as sugar beet harvesting. Moreover, planning tools are being developed to generate and compare plans based on different sets of inputs (such as different potential reference lines obtained from the semantic environment representation component) in order to select the set of inputs that reduces the most the damage on the soil.