Analysis and pattern recognition
To identify and record the effects of field traffic-related soil compaction on plant development, a UAV is used to overfly the fields for several times.
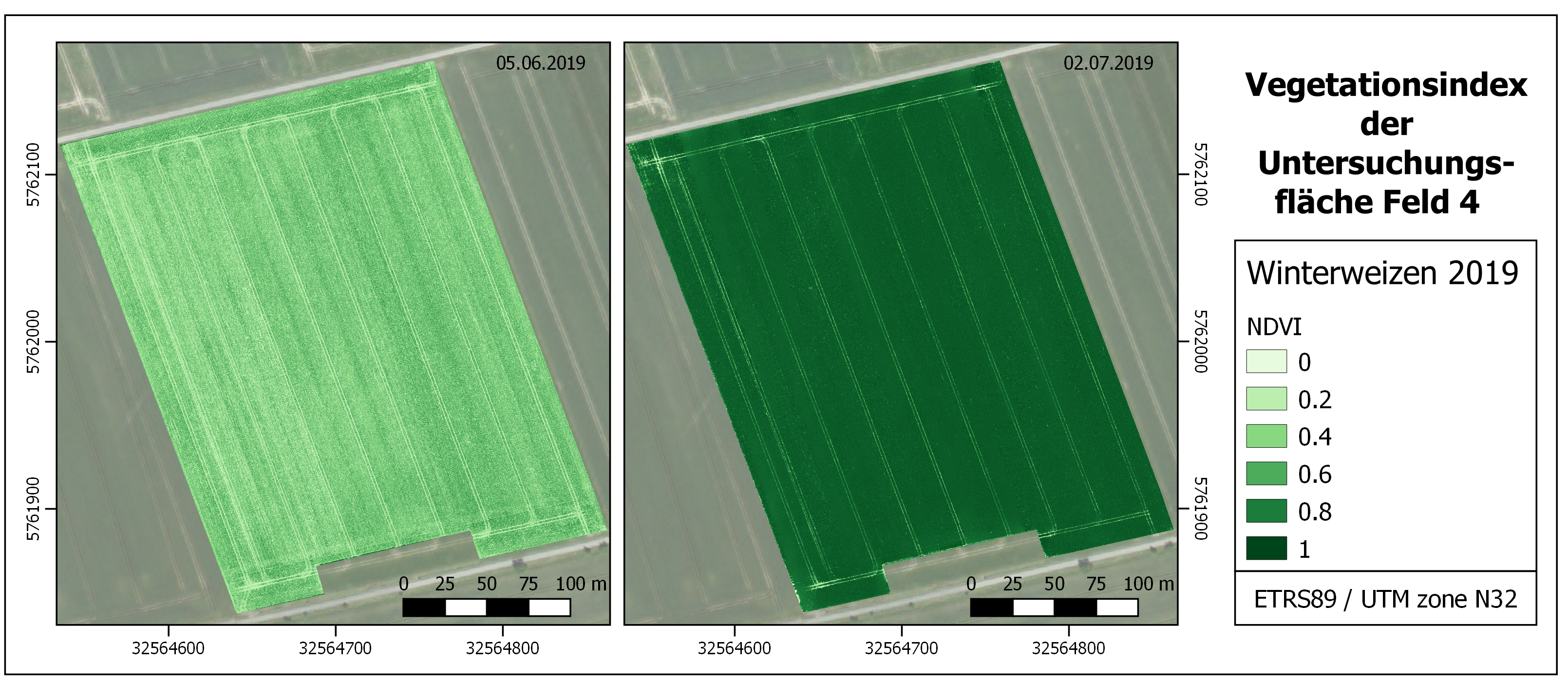
The aim of the UAV (Unpiloted Aerial Vehicle) mission is to spatially detect and subsequently quantify the effects of field traffic-related soil compaction on plant development and biomass production. For this purpose, the UAV will fly over the fields several times during the growing season to derive the spatial distribution of plant height, plant density, above-ground biomass, and different vegetation indices (NDVI, SAVI, WDRVI).
To analyse whether the vegetation patterns are related to soil compaction, the yield is first determined for conspicuous sites and then soil samples are taken for further determination in the laboratory (e.g. hydraulic conductivity, air conductivity).
The procedure is as follows:
1. Flight planning
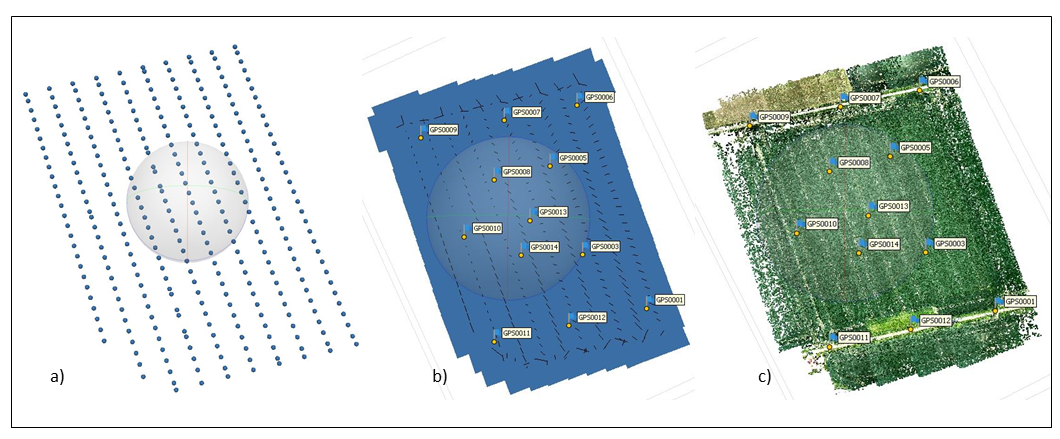
2. Distribution of the ground reference points and RTK calibration
3. Conducting of flight missions over the fields (RGB, NIR)
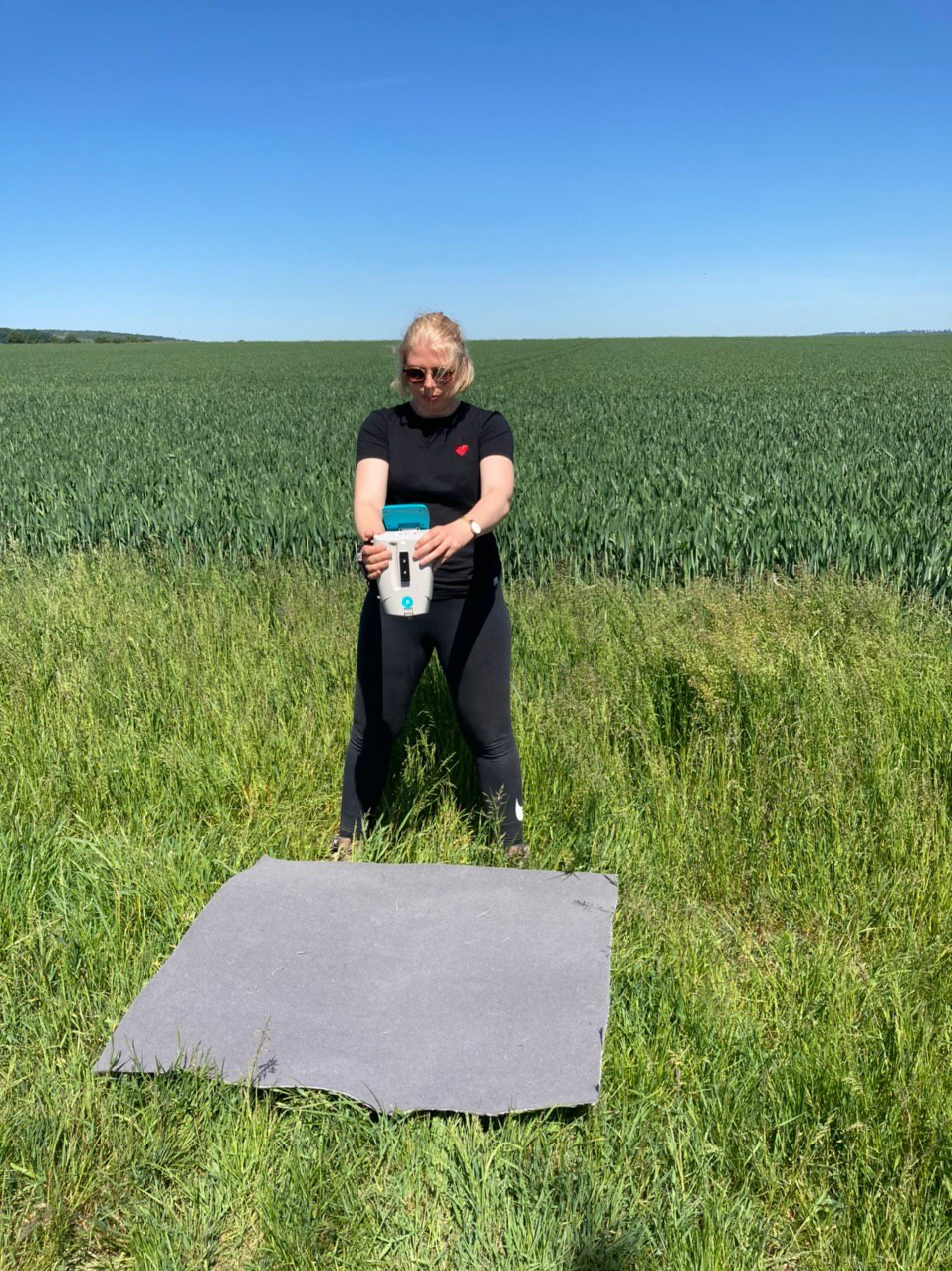
4. Acquisition of spectra from reference surfaces with the field spectrometer
5. Data preparation and processing
- Spectral calibration
- Processing using Structure from Motion techniques
- Spatial correction using calibrated ground reference points
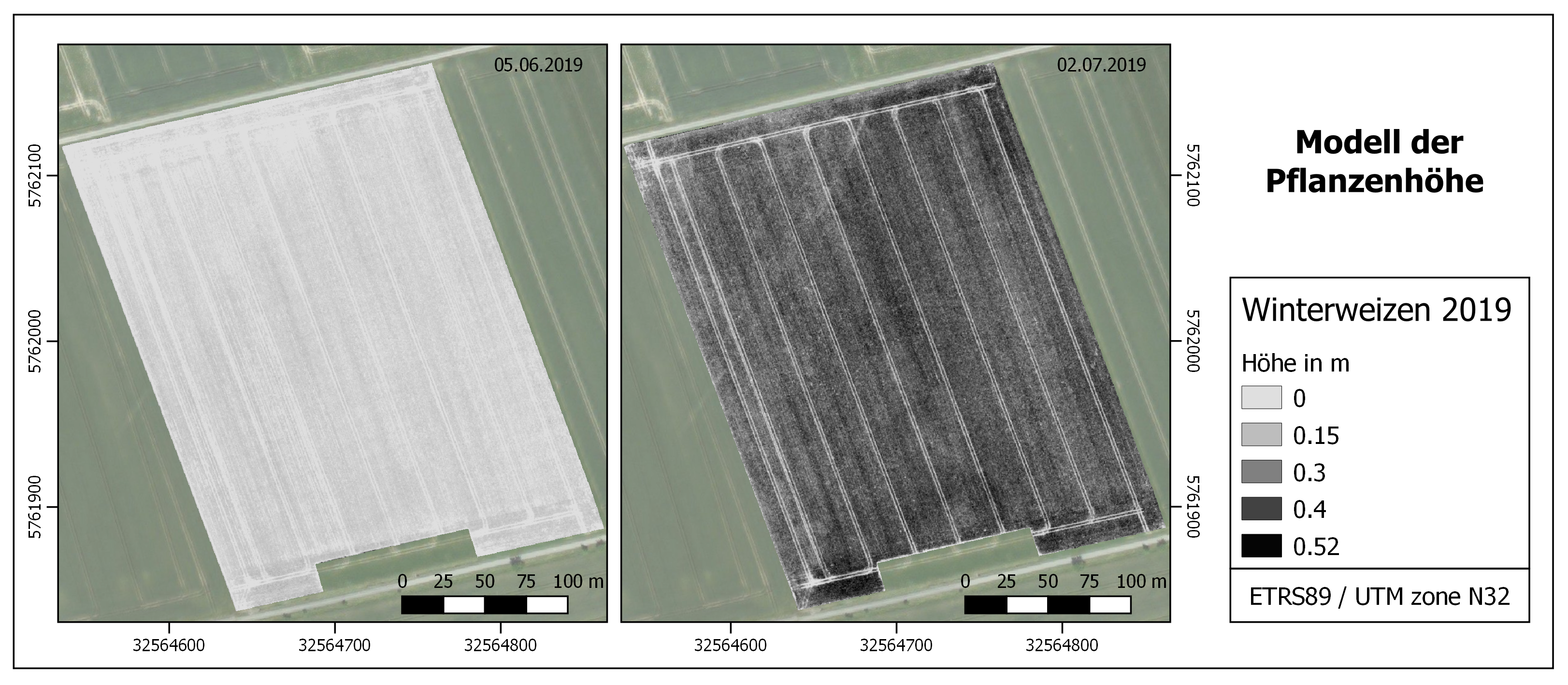
- Creation of digital terrain models (DGM) and orthophotos
6. Calculation of plant height and vegetation indices
7. Pattern recognition through clustering algorithms like K-Means
8. Sampling of detected patterns in the field (yield measurement, soil samples)
9. Correlation analysis between detected patterns and samples taken in the field
The overall objectives of this work package are therefore:
(1) detection of spatial soil compaction effects through the analysis of plant signals
(2) detection and differentiation between field traffic-related compaction signals and signals relating to naturally given soil structures or soil properties
(3) derivation and selection of the most powerful pattern recognition and classification algorithms for the spatial recording or allocation of soil compaction effects and risks
(4) verification and evaluation using field and laboratory measurements