Semantisches Assistenzsystem - Routenplanung
Für eine bodenschonende Bewirtschaftung sind bodenschonende Fahrrouten wichtig, um die Belastung des Bodens bei der Ernte zu verringern. Hierfür bietet das semantische Assistenzsystem eine Routenplanung an, um Landwirt*innen geeignete Fahrwege zu präsentieren.
Die Wissenschaftler*innen entwickeln eine Reihe von Planungskomponenten, um bodenschonende Fahrrouten zu generieren. Mit diesen kann die Belastung des Bodens während der Ernte verringert werden. Die Basisinformationen für das Feld, auf dem die Erntekampagne stattfindet (zum Beispiel Feldgrenze, potentielle Spurbezugslinien und Lage der Entlade- und Zugangspunkte), werden aus manuellen Eingaben der Landwirt*innen (Projektphase I) oder aus der semantisch annotierten geometrischen Repräsentation des Feldes und seiner Umgebung (Projektphase II) abgeleitet. Diese Felddaten werden von den Planungskomponenten verwendet, um prozessspezifische Feldgeometrien, wie Vorgewende und Bezugslinien zu generieren. Diese werden anschließend zur Planung des Ernteprozesses sowie zur Generierung der Routen für die an der Kampagne beteiligten Landmaschinen (zum Beispiel Erntemaschinen und Überladefahrzeuge) verwendet. Die Routen werden auf der Grundlage einer für das Feld und seinen aktuellen Zustand spezifischen Bodenbelatungskarte generiert, die darauf abzielt, die Schädigung des Bodens während der Fahrt zu reduzieren. Diese Routen werden den Landwirt*innen schließlich als empfohlene Fahrwege präsentiert.
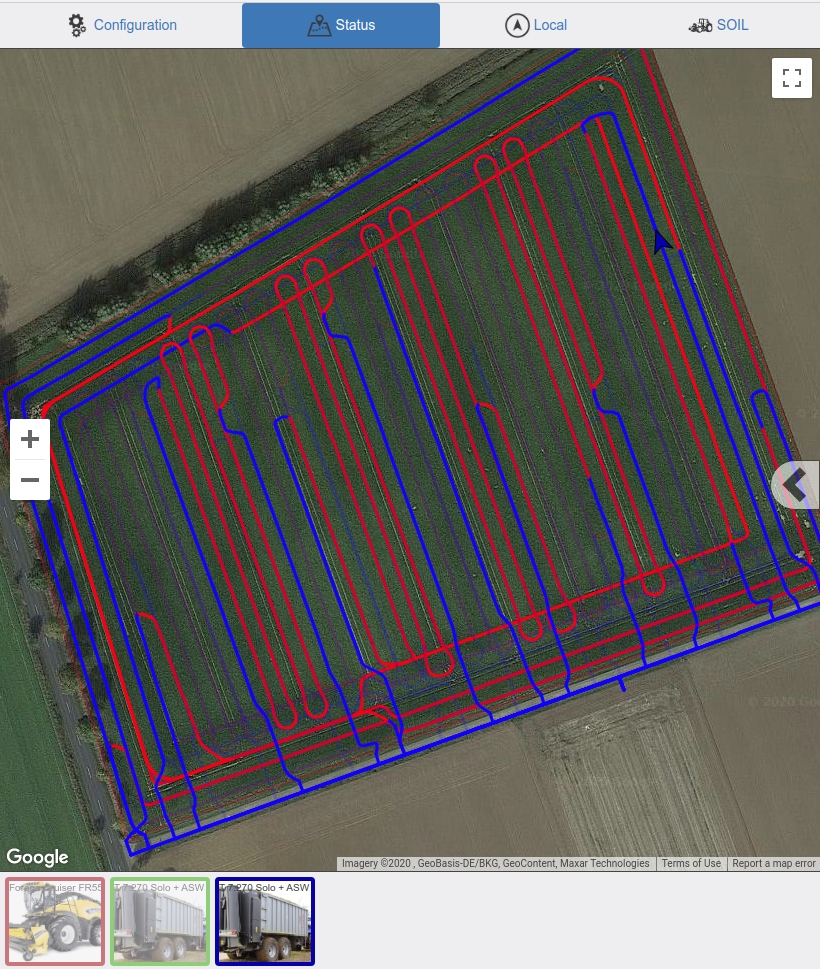
Das Ziel der ersten Projektphase war die Entwicklung einer ersten Version des Routenplanungssystems für die Silomaisernte. In diesem Szenario erntet ein Häcksler ein Maisfeld ab, während Überladefahrzeuge (OLV) vom Häcksler beladen werden und zu vordefinierten Entladeorten fahren, sobald sie voll sind. Die Überladung ist zwischen den beteiligten OLVs aufgeteilt. Die Routen der Erntemaschine werden mit dem Ziel berechnet, das gesamte Feld zu abzuernten. Dahingegen werden die OLV-Routen generiert, um dem Häcksler während der Überladung zu folgen und von/zu den Entladeorten in einer Weise zu fahren, die die schädigenden Auswirkungen ihrer Fahrt auf den Boden möglichst reduziert.
In der zweiten Projektphase wird das Routenplanungssystem verbessert und erweitert. Die Erweiterungen umfassen die Unterstützung von Szenarien, bei denen mit Bunkern ausgerüstete Erntemaschinen an der Kampagne teilnehmen und sowohl für die Ernte als auch für den Transport des Ertrags zu den Entladeorten verantwortlich sind. Diese Art der Planung kann für verschiedene Szenarien verwendet werden, wie zum Beispiel für die Zuckerrübenernte. Darüber hinaus entwickeln die Wissenschaftler*innen Planungswerkzeuge, um Pläne zu erstellen und zu vergleichen, die verschiedene Eingabeparameter berücksichtigen (z.B. verschiedene Varianten der Referenzlinien aus der semantischen Umgebungsrepräsentation). Die Vergleichsergebnisse können schließlich dazu verwendet werden, das Szenario auszuwählen, das die Schäden am Boden durch Befahrung am stärksten reduziert.